 同济大学主页
同济大学主页


研究方向
-
研究方向一:智能协同控制与优化决策
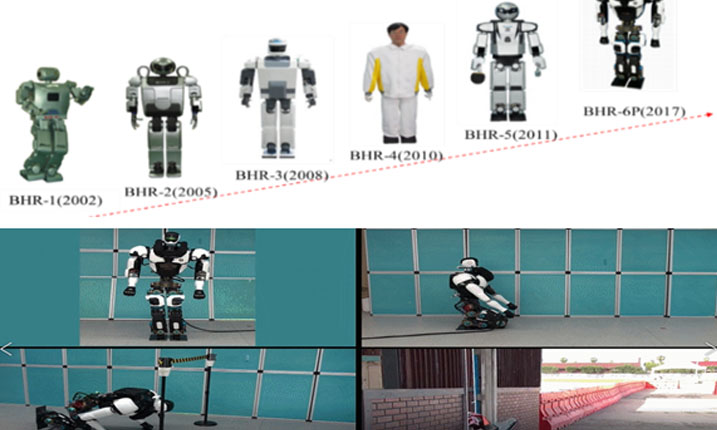
探究运动仿生行为的机理,提出仿生多尺度感知、仿生运动规划、仿生自主控制、仿生功能单元与驱动理论与方法,建立仿生无人系统研究的技术集成平台。
-

研究方向二:复杂动态场景主动感知与理解
在CPHS构架下,构建无人系统虚实融合智能发育与衍生理论,揭示基于人机交互大数据的高效智能增长机理,提升无人系统长期自治能力,实现无人系统自主学习与进化。
-
研究方向三:智能发育与衍生
探究无人系统新型感知机理,提出感知、认知与理解的新理论与新方法,实现大范围复杂动态场景建模、学习与理解。
-
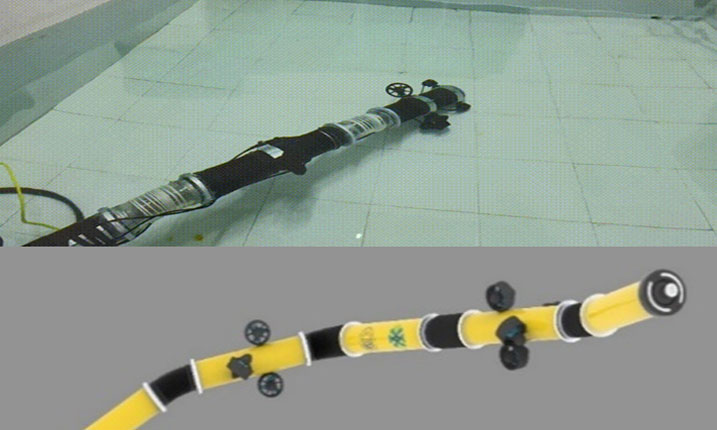
研究方向四:智能仿生与驱动
构建无人系统自主协同与决策和群体智能理论,提升无人系统协同解决复杂动态问题的能力,揭示群体智能涌现机制与演化规律,实现基于交互的无人系统自主智能进化。
