同济大学主页
同济大学主页


科研平台
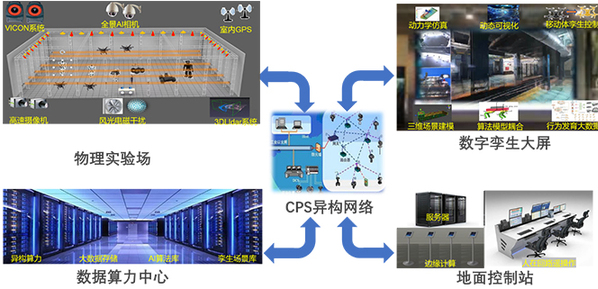
无人系统虚实融合发育场
为获取无人系统研究必备的安全可控的场景感知大数据,支撑无人系统的虚拟交互发育与学习进化,构建了具备虚实融合功能的自主智能无人系统可信交互智能发育平台,包括全域高精度高速红外动作捕捉系统、视觉智能辅助动作捕捉系统、数字孪生一屏集控系统、千台异构数据算力中心及无人系统集群地面控制站等系统设备,可实现平台内全场景、高动态环境的感知,支持不少于50台单体高精度位姿实时感知与状态监测,支持分布式无人系统集群的集中可视化与智能协同调度,实现大规模无人系统集群与外界环境的交互推演,为无人系统人机环交互与作业任务训练提供研究基础。