同济大学主页
同济大学主页


科研平台
开物实验室
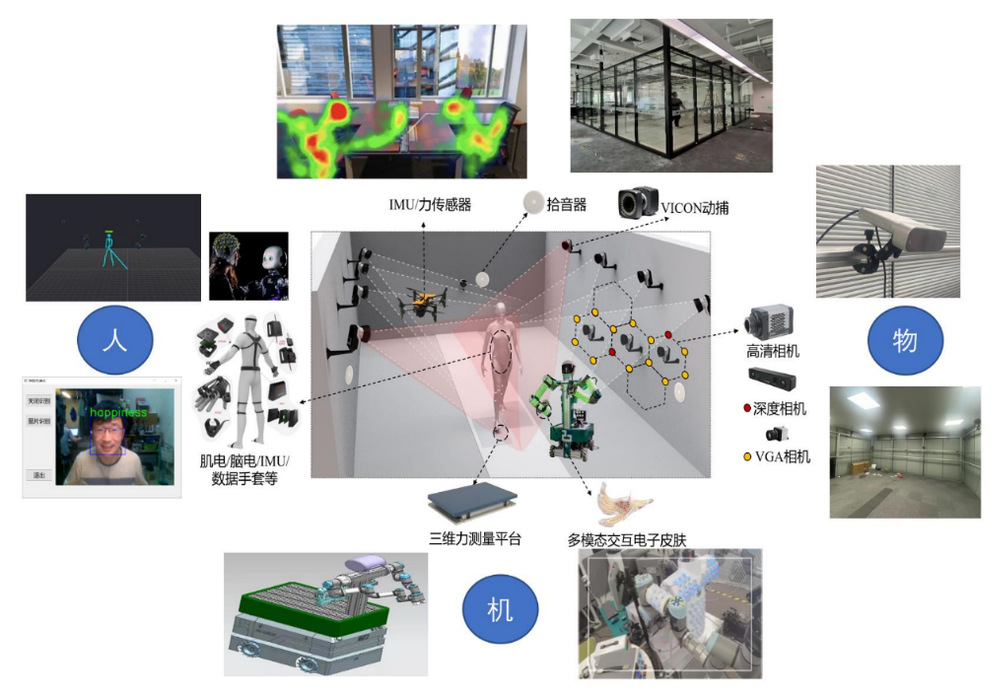
围绕无人系统类生命智能发育科学问题,针对当前研究缺乏行为学习数据以及算法依赖于被动数据的局限,以机器人仿人技能学习大数据库及具身交互两个方向为重要抓手,构建人-机-物三元空间高维交互感知大数据表征体系,通过与环境的交互实现智能持续增长,形成机器人发育从“形似”(运动学)到“神似”(动力学),再到“灵似”(智能自涌现)的知识增长新范式。 创新设计了数物融合的无人系统高效学习实验平台,主要硬件包括动多模态运动高精度感知设备、灵巧操作技能精细交互力感知设备、人类意图推理与人机共融互信平台,人-机交互视-触融合平台等。